The w o r k i n g f l u i d
Density, kg/m3
Kinematic viscosity, сSt
Volumetric module of elasticity, МPа
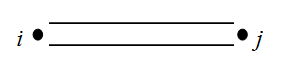
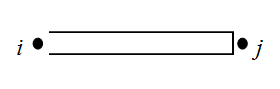
Description of elements of the hydraulic circuit
 NOTE:
NOTE: Type of valve (latin letters): P - pressure, R - reduction, C - check.__________________________________________________________________________
 NOTE:
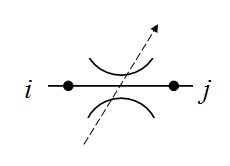
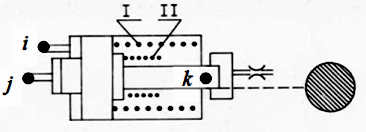
NOTE: The two-stage (indirect action) valve consists of two moving elements (see Fig.):
main valve (nodes
r,
s,
t) and
pilot valve (nodes
i,
j,
k). At a common drain line of valves:
s =
j , at separate drain lines:
s ≠
j .
 NOTES:
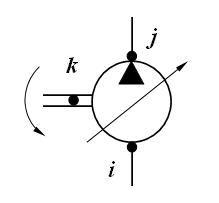
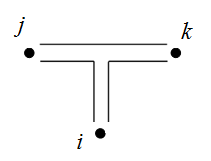
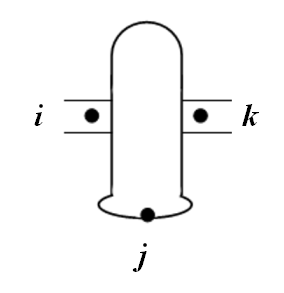
NOTES: 1. At dividing of flows:
i - an input node,
j and
k - output nodes, sign D.
__________________________________________________
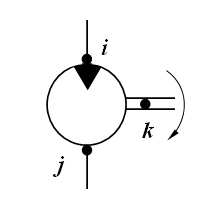
2. At adding of flows:
i and
j - input nodes,
k - an output node, sign S.
 NOTES:
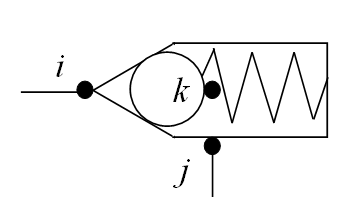
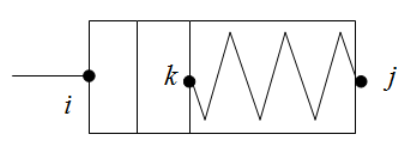
NOTES: 1. For a gas accumulator a rigidity and preliminary compression of spring are equal to 0.
2. For a spring accumulator a pressure of charged gas and an exponent of polytropic process are equal to 0.
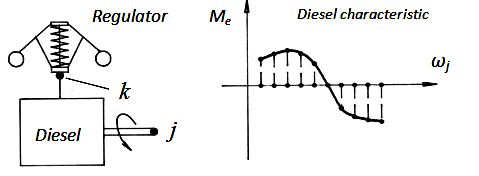
 NOTE:
NOTE: If the power regulator is controled by pressure of one node of circuit, then
i =
j .
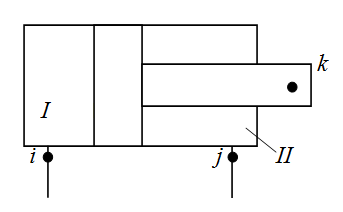
ПРИМЕЧАНИЕ: Pilot operated check valve has two moving parts(see Fig.):
valve (nodes
i, j, k) and
pusher (nodes
r, s, t).
Node
r of pusher at the same time is a node
i of valve.
The equation coefficients for different types of linear dynamic elements
The 2-th order links
|
The 1-th order links
|
The 0-th order links
|
1. General case: a2 ≠ 0.
2. Aperiodic (oscillatory):
a2 ≠ 0, b1 = c1 = 0.
3. Inertial integrating:
a2 ≠ 0, a0 = b1 = c1 = 0.
|
1. Aperiodic (inertial)
a1 ≠ 0, a2 = b1 = c1 = 0.
2. Perfect integrating:
a1 ≠ 0, a0 = a2 = b1 = c1 = 0.
3. Inertial differentiating:
a1 ≠ 0, a2 = b0 = c0 = 0.
|
1. Perfect amplifier
(instantaneous), an adder:
a0 ≠ 0, a1 = a2 = 0.
2. Perfect differentiating:
a0 ≠ 0, a1 = a2 = b0 = c0 = 0.
3. Perfect with introduction of derivative:
a0 ≠ 0, a1 = a2 = c0 = 0.
|
 NOTES:
NOTES:
1. This element is either a wheel with independent drive, or the drive axle.
2. Side scheme of transmission is replaced by the equivalent two-wheel scheme with independent drive of wheels.
3. The moment of inertia is given to the shaft of the wheel motor (axis, side) and is shown in the table of motor's data.
 |
 |
| NOTE: The order of the nodes (input-output) must correspond to the direction of flow. |
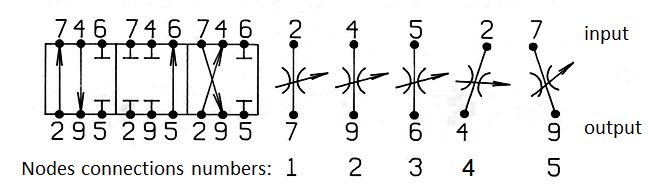
Positions of the spool, determining the field of the open connection |
P a r a m e t e r s of the v e h i c l e m o t i o n
Vehicle mass, kg
Resistance to the vehicle movement, N
Longitudinal road slope, deg.
C o n s t a n t e x t e r n a l l o a d s
Load torques of mechanisms, N.m
in order of numbers of hydraulic motors
Forces on the cylinders rods, N
in order of numbers of hydraulic cylinders
Type of perturbation TP:
1 - load torque given to the N-th motor shaft, N.cm;
2 - force on the N-th cylinder rod, N;
3 - relative displacement of the N-th pump;
4 - relative displacement of the N-th motor;
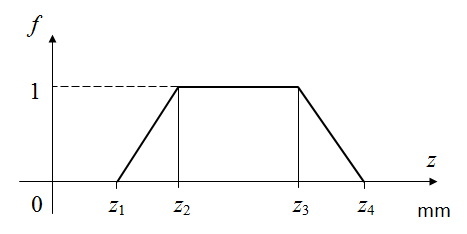
5 - relative area of passage section of the N-th throttle;
6 - displacement of the N-th spool, mm;
7 - mass reduced to the N-th cylinder rod, kg;
8 - resistance force of vehicle, N;
9 - flow in the node N (static characteristic of valve Q(p), pump flow etc.), l/min.
10 - control signal at the node N (voltage, V; current, mА; etc.)
N - element type number if TP = 1 , . . . , 7 ;
N = 0, if TP = 8;
N - node number ifTP = 9 or 10
|
Type of argument ТA (phase variable in the node NN):
0 - time, s;
1 - pressure, MPa;
2 - flow, l/min;
3 - force, N;
4 - linear velocity, m/s;
5 - torque, N.m;
6 - angular velocity, rad/s;
7 - linear displacement, mm;
8 - rotation angle, rad.;
9 - wheel slipping;
10 - signal of control system (current, mA; voltage, V; etc.)
NN = 0, if ТA = 0
|
P a r a m e t e r s for c a l c u l a t i o n
Integration step h, s - recommended value 0.0001 s
Initial time, s
Number of integration steps
Step of the results output Н, s Н - multiples of
h
Carrier of initial conditions (IC) 0 - zero IC, 1 - IC are entered on the screen(see below), 2 - IC in a special file
I n i t i a l c o n d i t i o n s
NOTE. Initial conditions have the following structure:
node number - "
force" - "
speed" - "
displacement",
where "
force" - pressure (MPa), force (N) or torque (N. m); "
speed" - flow (l/min), linear (cm/s) or angular (rad/s) speed,
"
displacement" - linear displacement (cm), rotation angle (rad) or slipping (-).
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
What the c i r c u i t n o d e s the c a l c u l a t i o n r e s u l t s are d i s p l a y e d
List of the circuit nodes numbers
NOTE:
List of the circuit nodes, in which the results set displays in ascending order of node numbers.
If necessary to output all nodes of the circuit, put 0 instead of the list or at the beginning (in this case the list is ignored).
If necessary to output not in all nodes, but in the given nodes, you can specify the list of these nodes, and 0 is not assigned.