The w o r k i n g f l u i d
Density, kg/m3
Kinematic viscosity, cSt
Description of elements of the hydraulic circuit
NOTE: qmin and qmax - minimum and maximum displacement volume,
control range of pump: 1 - qmin/qmax _________________________________

For constant displacement pump its control range is equal to 0.
NOTE: qmin и qmax - minimum and maximum displacement volume,
control range of motor: qmax/qmin _________________________________________
For constant displacement hydraulic motor its control range is equal to 1.
NOTE: Type of valve (latin letters): P - pressure, R - reduction, C - check. _____________________________________________________________________________________
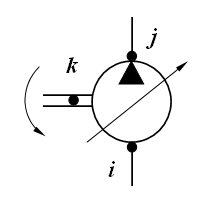
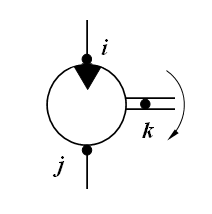
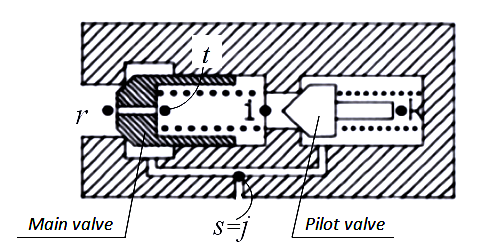
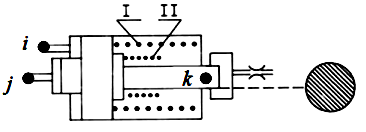
NOTE: The two-stage (of indirect action) valve consists of two moving elements (see Fig.):
main valve (nodes
r,
s,
t)
and
pilot valve (nodes
i,
j,
k). At a common drain line of valves:
s =
j , at separate drain lines:
s ≠
j .
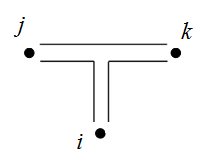
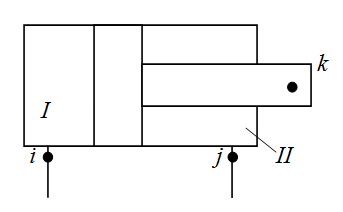
NOTES: 1. At dividing of flows: i - an input node, j and k - output nodes, sign is D. _______________________________________________
2. At adding of flows: i and j - input nodes, k - an output node, sign is S.
 NOTES:
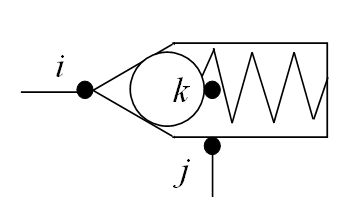
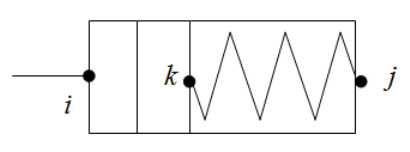
NOTES: 1. For a gas accumulator a rigidity and preliminary compression of spring are equal to 0.
2. For a spring accumulator a pressure of charged gas and an exponent of polytropic process are equal to 0.
 NOTE:
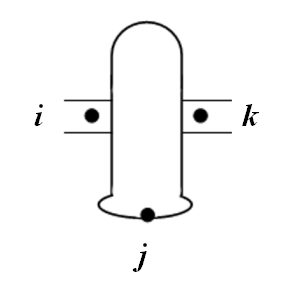
NOTE: If the power regulator is controled by pressure of one node of circuit, then
i =
j .
 NOTES:
NOTES:
1. This element is either a wheel with independent drive, or the drive axle.
2. Side scheme of transmission is replaced by the equivalent two-wheel scheme with independent drive of wheels.
3. The moment of inertia is given to the shaft of the wheel motor (axis, side) and is shown in the table of motor's data.
 NOTE:
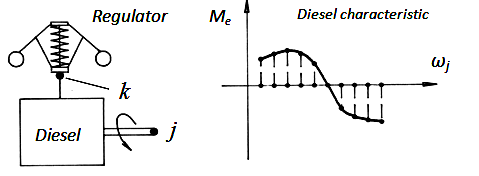
NOTE: If inertia moment of diesel rotating parts is 0, the diesel in the calculation is ignored and
angular speed of its shaft is assumed fixed, corresponding to the zero approximation.
P a r a m e t e r s of the v e h i c l e m o t i o n
Minimum traction, N
Maximum traction, N
Traction force increment (step), N
E x t e r n a l l o a d s
in order of numbers of hydraulic motors
in order of numbers of hydraulic cylinders
R e l a t i v e d i s p l a c e m e n t v o l u m e s of h y d r a u l i c m a c h i n e s
in order of numbers of pumps
in order of numbers of hydraulic motors
N u m b e r s of p o w e r r e g u l a t o r s of h y d r a u l i c m a c h i n e s
in order of numbers of pumps
in order of numbers of hydraulic motors
P a r a m e t e r s for c a l c u l a t i o n
0 - the screen sets (see below), 1 - is recorded in file
Z e r o a p p r o x i m a t i o n
NOTE. Zero approximation has the following structure:
node number - "
force" - "
speed" - "
displacement",
where "
force" - pressure (MPa), force (N) or torque (N.m); "
speed" - flow (l/min), linear speed (cm/s) or angular speed (rad/s),
"
displacement" - linear displacement (cm), rotation angle (rad) or slipping (-).
What n o d e s of the c i r c u i t the c a l c u l a t i o n r e s u l t s are d i s p l a y e d
NOTE:
List of the circuit nodes, in which the results set displays in ascending order of node numbers.
If necessary to output all nodes of the circuit, put 0 instead of the list or at the beginning (in this case the list is ignored).
If necessary to output not in all nodes, but in the given nodes, you can specify the list of these nodes, and 0 is not assigned.